
集科研开发、设计生产、产品销售和技术咨询为一体的高新技术企业
24小时服务热线:
400-088-7850
一分钟了解六自由度平台基本控制原理
2023-04-26 09:21
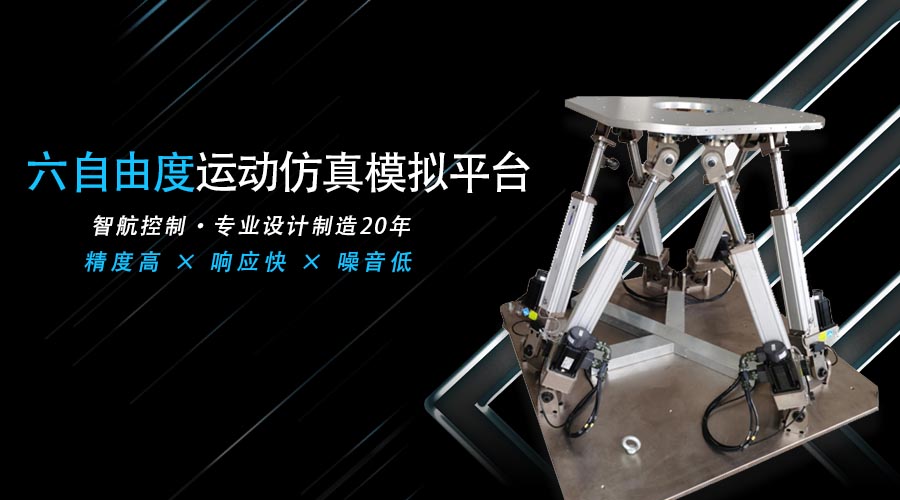
我们都知道六自由度运动平台通过六个可以伸缩的动作筒来实现平台的空间六自由度运动(垂直、横向、纵向、俯仰、滚转、摇摆),即X,Y,Z方向的平移和绕X,Y,Z轴的旋转运动,以及这些自由度的复合运动。然而控制其运动的原理你知道吗?六自由度运动平台厂家带你一分钟了解其控制原理。
基本控制原理图如下:
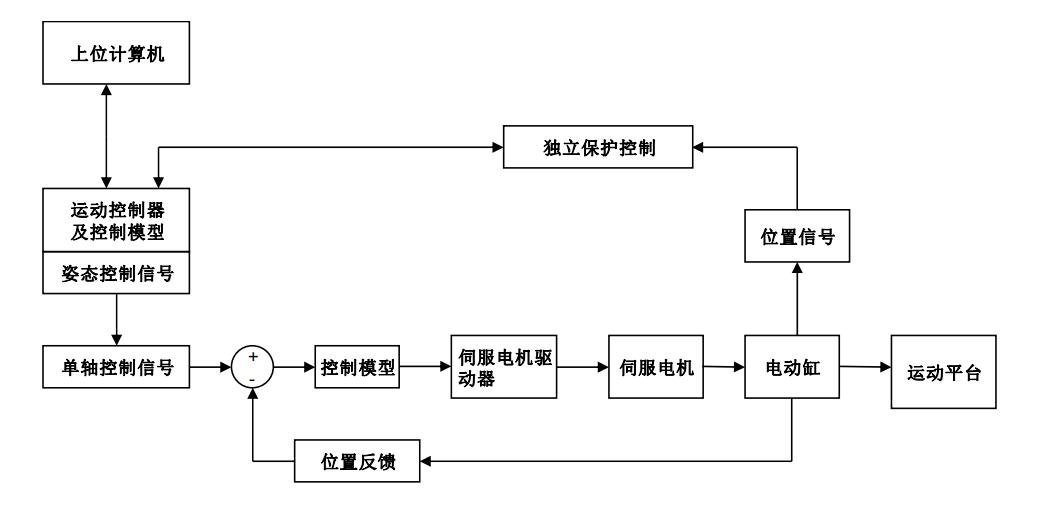
智航六自由度平台主要控制功能包括:
·提供数据接口用于电动缸行程限位、过行程报警保护、零位初始化等功能。
·控制器具有保护算法,当超出模拟台运动范围的指令给出时会发出报警信号并进行运动限制。
·提供数据接口用于实时显示多自由度平台工作状态,当前电动缸位移、模拟运动坐标、模拟运动速度等。
·提供数据接口用于平台随动试验工作窗口,操作人员可以将模拟平台的目标位置如中心点空间位置 Z 及欧拉夹角β,γ输入计算机(或通过模拟滑杆输入),通过运动控制器控制模拟台到达目标姿态。
·提供数据接口为了运动平台能够更加安全可靠的运行,控制器设置了平台归位和初始化程序,使得平台在任意工况下能够顺利的回到安全状态。
·上位计算机控制数据可以进行分组打包发送到运动控制器,控制器自动插值后控制模拟台输出。
·根据用户要求,控制器包含动作衔接、减震算法等控制环节。
·数据接口运动控制器可以通过 Modbus TCP 或者 UDP 协议与用户控制操作计算机连接,控制器提供上位机应用函数接口,便于第三方应用软件连接,有 VB、C 的编程示例供参考。 运动控制器也可以通过 RS232/485 与具有串行通讯能力的设备进行通讯,通讯协议为 Modbus RTU或自行定义的自由协议。
智航专业六自由度运动平台设计制造商,可根据客户需求定制更符合用户使用要求的六自由度平台。免费在线咨询及定制方案欢迎新老客户垂询。
Copyright © 2022 无锡智航控制技术有限公司 版权所有 苏公网安备32021402002995号
;){kind=link}